Location Data Filtering
The Quuppa system generates a raw location estimate, that can be filtered in various ways to improve the quality of dot on the map type visualisations for Quuppa projects. For most applications, we recommend the use of the smooth position filter.
The aim of this section, is to explain the difference between the raw position generated by the Quuppa Positioning Engine (QPE) and the output you get when you use the available filtering, to make it easier to select the right filtering for your use case. Two simple shapes, a square and a circle, will be used as examples of tag paths to showcase the different traits of the various filtering options.
Raw Position
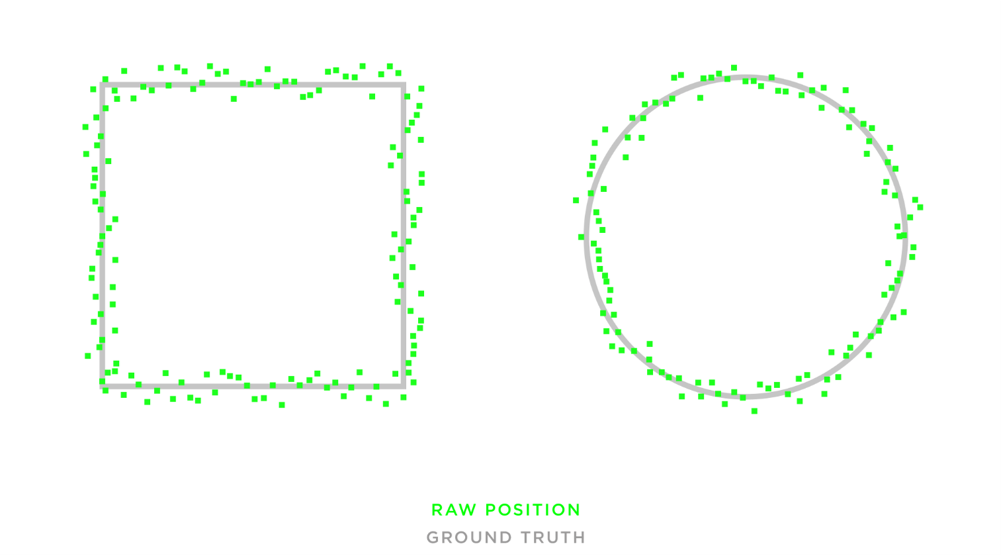
The raw position output is the unfiltered positioning estimate (x, y and z coordinates for the tag) calculated by the QPE. This is the real-time data output onto which any of the chosen filters can be applied.
While the raw position provides the real-time position of the tag as calculated by the QPE, it is not recommended for visualisations of how the dot moves around the map as it provides a position that jumps on the screen. This is because the QPE gives out the positioning data points as they are calculated, without any additional filtering. With the tags transmitting at predefined intervals and the air interface and environment causing some packets to be lost, the raw position provides individual data points available. How much the tag jumps depends on various project settings, such as the tag configurations used, the air interface load management settings and the deployment environment.
In the image below, you can see the green dots representing the individual data points given out by the QPE.
Smooth Position
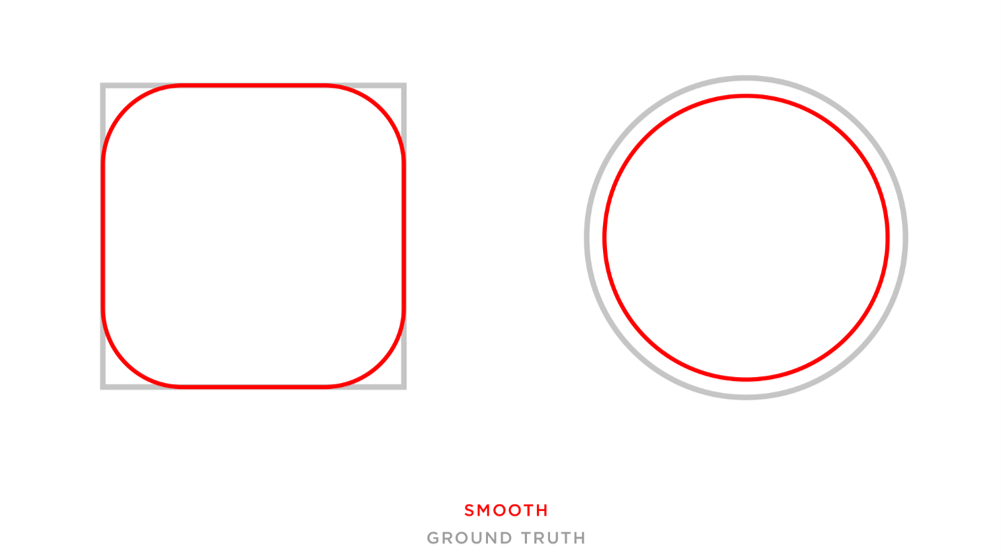
When the smooth position filter is applied to the raw position data, the QPE uses historical data about how the tag has moved around the tracking area to calculate averages that can be used to smooth out the jumps in the visualisation and provide an even path for the tag. The filtering creates a slight lag in the positioning results, but as the delay is very small, it does not have a significant impact for most applications and use cases.
The smooth position filter is recommended for the majority of applications based on the Quuppa system as it provides a better user experience via the more even tag trajectory shown in any visualisations, i.e. a smoother dot on the map.
In the image below, the red line represents the smoothed tag trajectory provided after smooth position filtering is applied to the raw position data points.
Kalman Position
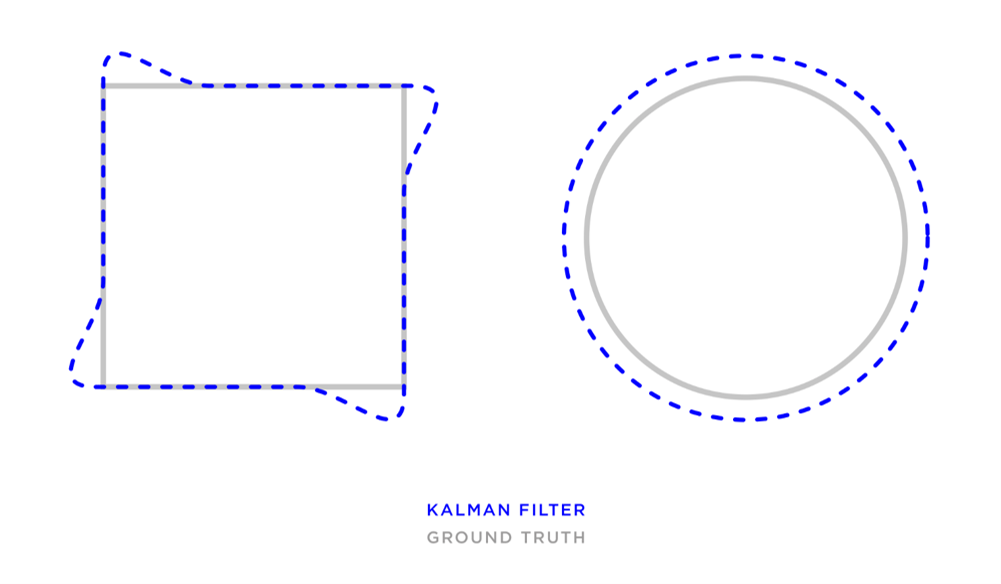
The Kalman position is a predictive filter that can be applied to the raw position estimate generated by the QPE. The filter uses the direction that the tag is travelling in combined with the speed at which it is moving to predict where the tag will most likely be in a moment (e.g. T+1 minute). The assumption behind the calculation is that the tag will continue to travel at the same pace along the same trajectory.
The Kalman position is useful for providing a smooth tag trajectory in real time as it uses predictions of data points rather than historical data. It works well in cases where a tags trajectory is stable, such as the circle example in the image below. However, it is somewhat limited in cases where the tags trajectory is less predictable and may change direction or speed suddenly. For example, as seen in the square example in the image below, a sharp 90 degree angle of a corner is challenging as the prediction calculation is based on the tag continuing on it's current trajectory.
For more about Kalman filtering in statistics, click here.
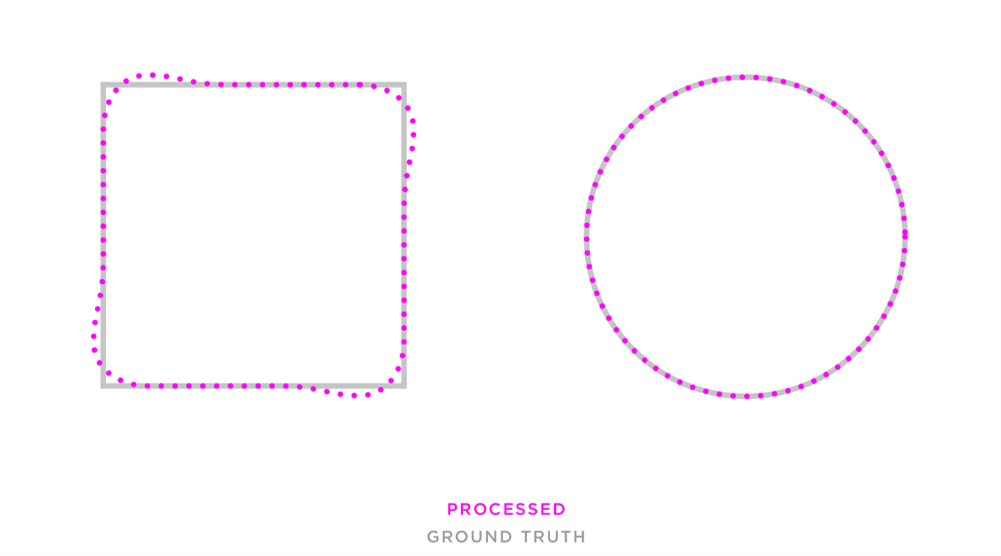
Processed Position
A processed position filter is also available for the raw position data generated by the QPE. This uses a combination of historical data (like the smooth position) and predictive data (like the Kalman position) to extrapolate where the tag has moved across the map.
As getting the processed position requires both historical and predictive data to be filtered, it is rarely used for real-time applications. The filter is typically applied later to recorded data, such as the data recorded by the QPE and viewed via the Quuppa Data Player QDP. It can be particularly useful in applications that overlay the tag trajectory over for example video footage.
As we can see in the image below, the processed position is a very accurate positioning result that follows the determined path, the square or circle, very closely.